
泛普工程机械设备管理系统具有如下的功能模块:
一、环境模块
环境模块涉及系统工作的一些外部参数,如温度、湿度、振动、冲击以及负载因素等。这些参数将影响整个系统的工作性能。它们在系统设计中构成了一系列的参数边界。系统必须在这些参数边界范围内生存和工作。任何一台仪器设备,在恒温下工作和在车间.工作以及野外工作,其环境条件显然存在着巨大的差别,因而对设计的技术要求也是极不相同的。所以,对环境模块的各种参数要求,必须强调实际应用标准和规范,例如,例行试验条件等。
二、机械结构模块
1、机械结构模块代表工程机械远程管理系统的机械结构零部件的物理实现。它主要涉及材料性能、结构特性、形状、体积及重量等参数。机械结构模块的输入由驱动模块和环境模块定义的条件一起提供的运动一机械结构模块的输出由测量模块接收,并转换为相对应的电信号。由于机械结构模块涉及系统的外貌,它还必须包括美学元件,应具有美观的造型。
2、机械结构模块在机电一体化系统中有着特殊的作用和功能,例如,改变速度、远距离动作、力的放大和反馈、速度和力的参数调节、同步传动和传送物料等。在设计中,必须考虑精度、惯量、阻尼、摩擦、间隙等参数要求,符合静平衡、动能最小等设计原则。
三、测量模块
1、测量模块涉及采集有关系统状态和行为的信息,由传感器、调理电路、变换电路等组成。输入参数是确定机械结构模块性能的物理变量,例如,强度、压力、位移、速度、力(力矩)以及变形等。输出参数是被测量的特征值,如电压、电流、相位、频率等。
2、对测量模块的设计要求,就是不失真地反映被测物理变量的时间变化曲线。这里,包含了分辨率、精度、线性范围、动态响应等一系列技术指标。
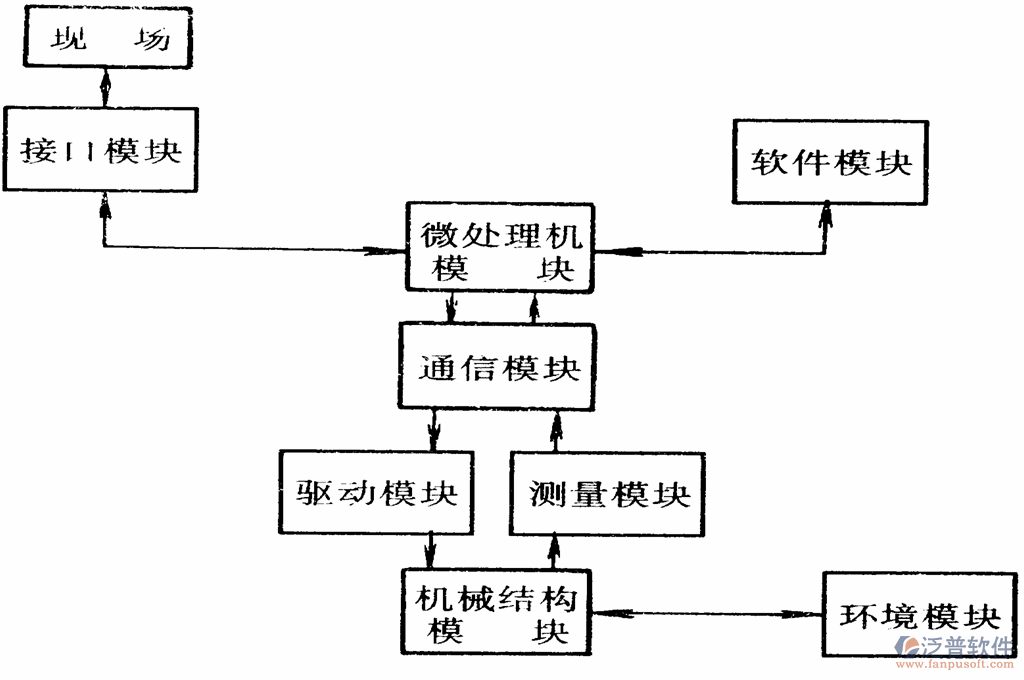
四、驱动模块
1、驱动模块通常由伺服放大器、执行机构、传动装置(减速器)、内反馈回路以及功率源等组成。在许多情况下,驱动模块本身就是一个伺服传动系统。驱动模块在系统中的作用是改变系统的运行状态,产生所希望的运动输出。它的输入条件由处理器的输出指令设定,指令由所要求的运动形式定义。
2、驱动模块的设计参数包括运动形式(直线运动、旋转运动、往复运动等)、运动变量(预定速度、最大加速度等)、额定力矩、电源功率、效率等。
五、通信模块
通信模块用作工程机械系统内部各模块之间的信息传输。输入和输出条件与被传输的信息特性、信息传输距离以及工作环境有关。远距离传输多数采用光缆。在车间环境下工作,为防止电噪声干扰,红外通信用得比较普遍。
六、微处理机模块
1、微处理机模块在系统中负责处理由测量模块和接口模块提供的信息。输入参数包括被测量的反馈量和与系统运行有关的设定参数,如行程、工作速度等。微处理机模块的输出,一部分是决定驱动模块的工作状态,另一部分是供给接口模块的信息,反映系统当前的工作状态。
2、对微处理机模块的设计要求取决于原始的系统功能,例如,控制机器人手臂、监控机器性能等。由控制和监控的具体功能所要求的传感器和执行器,可以决定微处理机的输入/输出数目和形式。根据将要实现的功能的数量和复杂程度,可以决定合适的中央处理器(CPU)以及存储器的容量和速度。
泛普机电一体化系统形式有哪些?
伺服系统:
伺服系统又叫做伺服机构。它是一种反馈控制系统,它的受控变量是机械运动,如位置、速度及加速度。多数伺服系统用来保持运动机械的输出位置紧密对应电的输入参考信号,因而是一种跟踪控制系统。
伺服系统通常是另一个机电一体化系统的组成部分。例如,多自由度工业机器人含有I多个伺服系统,每一个关节都有一个。多轴数控机床也有几个伺服系统,用来控制工作台运动。